本篇目录:
- 1、迈德威视的工业相机和进口品牌工业相机相比有何优势
- 2、工业相机数据接口有哪些
- 3、什么是以太网交换机?
- 4、工业相机都有哪些接口?1394接口与其他接口标准有着哪些不同
- 5、工业相机里面有电池吗
- 6、视觉ccd与plc通信原理
迈德威视的工业相机和进口品牌工业相机相比有何优势
1、迈德威视工业相机优势是支持自动或手动调节增益、曝光时间千兆以太网接口,无中继情况下,最大传输距离可到100m 支持硬触发、软触发以及自由运行模式。
2、索尼:索尼相机也是索尼公司的优质产品之一,索尼照相机走的是高端时尚前卫路线,CCD技术先进,便携中的高像素,防抖,自动捕捉头像,而且索尼照相机还支持笑脸快门,可以捕捉精彩的一瞬间。
-图1")
3、高速相机使用优势高速相机在使用的时候可以支持很多外界信号叠加融合,另外还有很多图像格式拥有很多硬件功能。
工业相机数据接口有哪些
1、在机器视觉检测技术中,当前工业相机的数据接口主要有GigE、USB0、CoaXPress、Cameralink、HSLink、10GigE,还有退居二线的IEEE 139USB0、LVDS、RS42SDI等。
2、相机可以将rawdata直接传输到计算机上进行处理。CameraLink接口:CameraLink是一种高速数据传输接口标准,它可以传输高质量的raw图像数据。相机可以通过CameraLink接口连接到带有CameraLink输入的图像采集卡或其他设备上。
-图2")
3、工业相机是机器视觉系统中的一个关键组件。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图像质量等,同时也与整个系统的运行模式直接相关。
什么是以太网交换机?
以太网交换机是数据链路层的机器,以太网使用物理地址(MAC地址),48位,6字节。其工作原理为:当接受到一个广播帧时,他会向除接受端口之外的所有端口转发。
以太网交换机是基于以太网传输数据的交换机,以太网采用共享总线型传输媒体方式的局域网。以太网交换机的结构是每个端口都直接与主机相连,并且一般都工作在全双工方式。
-图3")
交换矩阵和ASIC交换机内部核心处应该有一个交换矩阵,为任意两端口间的通信提供通路,或是一个快速交换总线,以使由任意端口接收的数据帧从其他端口送出。在实际设备中,交换矩阵的功能往往由专门的芯片(ASIC)完成。
以太网交换机就是更先进的集线器,比集线器功能更多。
HUB是集线器,交换机和集线器是不一样的,目前,80%的局域网(LAN)是以太网,在局域网中大量地了集线器(HUB)或交换机(Switch)这种连接设备。
工业相机都有哪些接口?1394接口与其他接口标准有着哪些不同
1、在机器视觉检测技术中,当前工业相机的数据接口主要有GigE、USB0、CoaXPress、Cameralink、HSLink、10GigE,还有退居二线的IEEE 139USB0、LVDS、RS42SDI等。
2、工业相机的数据接口分为:USB0/0、1394a/1394b、CamerLink、Gige、CoaXPress等类型的接口。
3、IEEE 1394接口,不需要控制器,可以实现对等传输,1394a最大传输距离为5米,1394b传输距离通常为10米,在降数据率情况下可延伸到100米,采用中继设备支持可进一步提高传输距离。
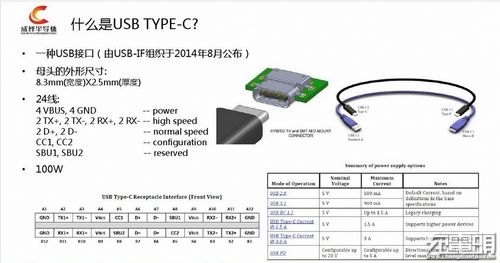
4、USB接口作为世界上应用最广泛的接口,有世界级的协会在不断推动升级USB接口协议,USB0正在成为新一代电脑和电子产品的标准接口。
5、像元:感光器件上的基本感光单元,也是一幅图像的基本单元。 光谱响应率:感光器件在不同波段的感光程度。 数据接口:数据传输接口方式,通常指GigE、USB0、CoaXPress、Cameralink、HSLink等。
6、不同的公司对1394接口技术也有不同的叫法,源于各自厂商注册的商标名称不同而已,例如Sony 称之为 i.Link,Texas Instruments 称之为 Lynx等,实际上都是一种东西。
工业相机里面有电池吗
电源系统:提供相机所需的电力供应,可以是电池或直接连接电源。 外壳和机械结构:用于保护相机内部组件,并提供固定、支撑和操作的机械结构。
有电池的。谅解工业相机,推荐研祥金码,全国500强企业,产品种类丰富,不输国外大牌,旗下的R-3000系列读码器,能够快速、全方位的条码捕捉读取。内置丰富的IO接口,支持复杂现场需求。
一般而言,机械快门的好处是不用电即可工作,缺点是高速和低速档会不太精确。电子快门比纯机械快门更精确,性能更高(最短曝光时间可以更短等等),可靠性更高,寿命更长。
外观上,除去镜头单反有很多按钮,以及一块小的显示屏,有电池,充电口。但是工业相机只有供电口和网口或者USB口。2D工业相机是支持编程的,根据自己的需求通过编程去实现出来。并且都有配套的客户端给用户调试。
D动态工业照相机成像技术主要采用物理透视学的基本原理与计算机信息处理技术,表1为四轮定位3D图像测量系统软件结构。图像测量系统主要部件有反光板、镜头、工业照相机、数码影像成像芯片、电脑等,下面分别介绍。
你说的是特殊型号的电池,为1/2AA电池,就是高度是AA(五号)电池的一半,民用比较少见。主要为工业用。
视觉ccd与plc通信原理
1、首先ccd和plc,一个为modbus从站(客户端),一个为modbus主站(服务器),相互连接。然后约定好通讯格式和地址,如图是往某个地址里写内容。其实CCD本身是没法直接往PLC传数据,都是基于arm或者win平台的视觉软件。
2、要。视觉自动定位技术的基本原理是通过机器设备所带的CCD将采集到的实物图像传输到PLC图像处理系统。plc是一种自动化控制系统,可以与传感器、执行器和其他设备进行通信。
3、电源“-”端要与编码器的COM端连接,“+ ”与编码器的电源端连接。编码器的COM端与PLC输入COM端连接,A、B两相脉冲输出线直接与PLC的输入端连接,连接时要注意PLC输入的响应时间。
到此,以上就是小编对于工业以太网拓扑图的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏