本篇目录:
- 1、车机技术之CAN、CAN-bus
- 2、命令汽车行驶的硬件
- 3、汽车can总线故障诊断图解
- 4、哪位大神能告诉额这种电路图的工作原理?在线等,非常感谢!
- 5、麻烦大佬帮看一下这图,CAN总线是什么状态?谢谢
- 6、rs485和can两种通讯哪个抗干扰性能好
车机技术之CAN、CAN-bus
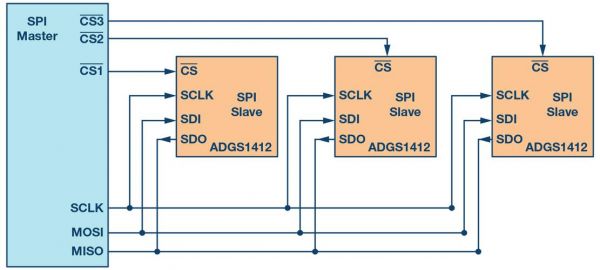
1、CAN控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
2、【太平洋汽车网】CAN线就是双绞线,绞在一起的目的是防止外界对它的干扰。CAN线是汽车各种不同功能电脑之间的通讯用的。如果汽车上报跟CAN通讯相关的故障,可以直接对它进行检测。
-图1")
3、Can-Bus总线技术是“控制器局域网总线技术(ControllerAreaNetwork-BUS)”的简称,在汽车中,该总线网络用于汽车各种传感器数据的传输,实现数据共享。
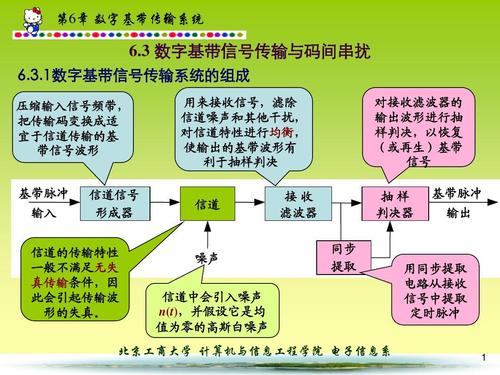
命令汽车行驶的硬件
提示信息知道宝贝找不到问题了_! 该问题可能已经失效。
CBW(CommandBlock Wrapper,即命令块分组)是从USB HOST发送到设备的命令,命令的格式遵从接口中的bInterfaceSubClass所指定的命令块,这里为SCSI传输命令集。
-图2")
汽车自动驾驶涉及的软硬件有哪些传感器传感器相当于自动驾驶汽车的眼睛,通过传感器,自动驾驶汽车能够识别道路、其他车辆、行人障碍物和基础交通设施。
车轮与轮胎是汽车行驶系统中的主要部件,汽车通过车轮由轮胎直接与地面接触在道路上行驶。
另外,ecu还有自适应功能,可以不断记录汽车行驶时的各项数据,可以实时调节油门、变速器的反应速度,更加适应驾驶员的驾驶习惯。
-图3")
汽车can总线故障诊断图解
故障显示:舒适性数据总线单线模式对于这种故障,典型的情况是在DSO显示图中,电池电压施加在CAN-Low线上,CAN-High线继续传输CAN-信号。
CAN总线检测方法:①在检查数据总线系统之前,需要确保所有连接到数据总线的电控单元没有功能性故障。功能性故障会影响某个系统功能流程,并对数据总线系统有间接影响,影响需要传感器信号的电子控制单元之间的通信。
方法1:可以拔掉开关线,使控制器转向线上的正极和转向信号线可以短路。如果CAN总线对应的电机没有转动,则可以确定总控制器有故障。如果电机转动,您可以确定CAN总线存在故障。
把每一个节点依次往CAN总线上面连接,接一个节点后观察并测试通信状况。
分析CAN总线系统故障的原因有三个:汽车供电系统引起的故障:汽车电子控制模块的工作电压一般为5-10伏,如果汽车供电系统提供的工作电压出现异常,部分电子控制模块会暂时工作异常,造成整个汽车CAN总线系统通讯不畅。
用故障检测仪进行检测,如无法进入控制单元或进入控制单元后,有U打头的.故障代码,一般表示CAN通讯网络有故障。
哪位大神能告诉额这种电路图的工作原理?在线等,非常感谢!
can_shd 是信号屏蔽,can_H 和can_L是信号线,由于你这里只有部分,所以不清楚这两根线供电带动电机还是单纯作为信号,一根控制正转一根控制反转。(如果信号线要供电,那么对换极性实现正反转)那个M是个执行电机。
首先通过变压器将AC220转成AC24V,然后通过桥堆和电容C1进行整流滤波;3DA1为调整管,3DG6是调整管。
T621的2,3脚为两个基准参考电压,1脚电压发生变化达到一定值时,和2,3脚电压比较大小,6,7脚的电压就会发生翻转,控制红灯(工作)和黄灯(报警)。整个电路可以用来做加热控制台,烙铁也可以。
形低速运转;通过(KT)延时后,KH1 释放、KH2 、KH3 吸合,U1 、V1 、W1 短接,U2 、V2 、 W2 连接电源,电动机以双 Y 型(YY 型)高速运转。——★控制电路也很简单,是互锁电路,其原理就自己分析吧。
我简单地说:lm358是运放,运放有个特点,在正向端电压高于负向端电压时,out输出高电平,反之输出低电平。
麻烦大佬帮看一下这图,CAN总线是什么状态?谢谢
图中Node A发送显性位,Node B&C发送隐性位。只要有一个节点发送显性电平,那么整个总线就都呈显性状态。CAN总线是一个线与的总线。所以这道题应该选A。
CAN是控制器局域网络的简称,是国际上应用最广泛的现场总线之一。结构简单,只有2根线与外部相连,并且内部集成了错误探测和管理模块。基本概念:CAN是ISO国际标准化的串行通信协议。
CAN总线就相当于汽车的中枢神经系统,是汽车里的一种通讯协议。相当于把很多的汽车电脑都并联到这两根线上,实现数据共享。CAN总线分为CAN高线和CAN低线,是由两条铜做的导线。
CAN总线在没有节点传输报文时是一直处于隐性状态。当有节点传输报文时显性覆盖隐性,由于CAN总线是一种串行总线,也就是说报文是一位一位的传输的,而且是数字信号(0和1),1代表隐性,0代表显性。
rs485和can两种通讯哪个抗干扰性能好
CAN总线通讯压差也是5V,RS485也是5V。不同是CAN是两条线往中间并。而RS485是两线翻转。如果忽略结合can的协议栈能达到的抢占特性,其实在现场布线时,两线抗干扰性还不如RS485的差分电压好,摆幅更大。
可以看出接口电路是不一样的,同时他们的通讯鉴别电平也是不一致的,电压范围不同,就像TTL和232的区别一样。但是他们电平范围相近,都属于低压范围,而且鉴别电平范围较低。
数据传输速度上,RS485总线优于CAN总线,CAN总线的最大波特率也只有1Mbps。抗外界干扰能力上,CAN总线使用差分电压信号传输数据,一般不受外界干扰的影响,但485总线不行。
到此,以上就是小编对于can总线传输原理的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏