本篇目录:
法兰克机器人怎么导入EDS文件
1、FANUC机器人EDS文件和EthnerNetIP总线中文说明书,以及使用PLC做主机器人做从实现功能。 EtherNet/IP (Ethernet/Industrial Protocol)是适合于工业环境的通信系统。利用EtherNet/IP,可在工业设备之间发送和接收时效性的应用信息。
2、采用来描述设备的通信协议和参数的文件,通过导入EDS文件,PLC可以获取设备的通信参数,从而实现与设备的通信。导入EDS文件还可以实现PLC与设备的自动识别。并根据设备的特性进行相应的配置即可完成。
-图1")
3、打开菜单栏导入。打开在菜单栏,依次点击工具、设备库、单击安装、选择eds文件就可以导入了。eds文件是让软件rslinx识别硬件,eds是描述硬件的,eds遵循开放的规范,是升级硬件的描述文件。
4、官方网站或相关控制系统供应商获取。访问发那科官方网站,在产品支持、下载或文档部分查找相关的eds文件,使用特定控制系统时,可联系相关控制系统供应商,询问是否提供发那科设备的eds文件。
5、在工具里面导入。打开eplan,在菜单栏中选择工具,进行工具点击设备库,点击安装,选择eds文件上传安装,安装完成后就上传成功了。
-图2")
发那科机器人spi是什么
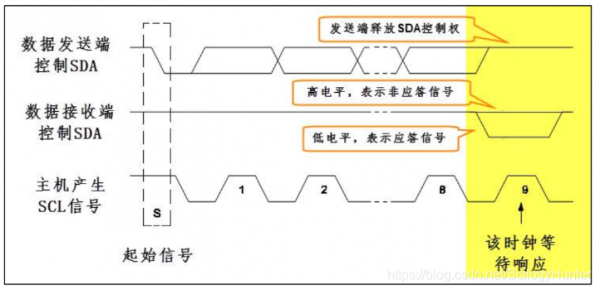
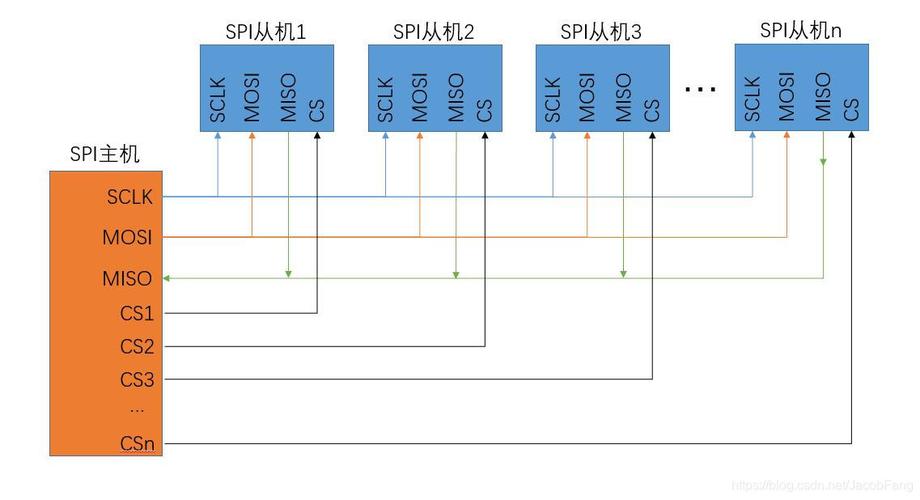
1、SPI是串行外设接口(Serial Peripheral Interface)的缩写。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便。
2、SPI是串行外设接口(Serial Peripheral Interface)的名称缩写。
3、SPI接口的全称是Serial Peripheral Interface,意为串行外围接口,是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在EEPROM、FLASH、实时时钟、AD转换器,还有数字信号处理器和数字信号解码器之间。
-图3")
4、MISO Master Input Slave Output 主机输入从机输出。MOSI (SPI Bus Master Output/Slave Input)SPI 总线主输出/ 从输入MISO (SPI Bus Master Input/Slave Output) SPI 总线主机输入/ 从机输出MOSI 。
5、SPI是英文Software Process Improvement的缩写,中文意思是软件过程的改进。它是CMM(还有其他能力模型)中的一个重要概念,CMM模型的目的就是要改进一个组织的过程,提高过程能力,所以叫做SPI-软件过程改进。
计算机和机器人之间的数据是如何传递的?
并行传输 并行传送方式,计算机的一种数据信息传送方式。在这种传送方式下,机器数码的每一位都用一根传送线同时进行传送,计算机的字长有多少位就应有多少根传送线。
通过各种传感器将信息传输到机器人的内部识别系统再由内部识别系统来判断输出内容。机器人之所以能识别环境。是因为在它身上安装了各种传感器、如识别声音的声敏传感器、分辨光强度的光敏传感器、具有触觉的压敏传感器等。
计算机网络中传输的信息都是数字数据,计算机之间的通信就是数据通信方式,数据通信是计算机和通信线路结合的通信方式。按照数据在线路上的传输方向,通信方式可分为:单工通信、半双工通信与全双工通信。
fanuc机器人执行完程序如何输出信号给plc?
1、PLC在机器人的组态完成后就可以获得通信的输入输出地址。
2、I/O。发那科机器人uo1可以按I/O(输入/输出信号)进行输出,也是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号,有通用I/O和专用I/O。
3、下图PLC采用西门子品牌,S7-300作为上位机,S7-200与机床通过I/O信号相连;S7-300与S7-200使用Profibus总线相连;S7-300与工业机器人使用I/O信号相连;工业机器人主体和控制器之间使用自带通讯电缆(直接接插)连接。
4、Fanuc机器人的UI/UO组输出是用来控制外部设备的数字输出信号。可以通过程序对其进行控制和分配。使用UI/UO组输出: 首先,需要在程序中定义UI/UO组输出的地址和名称。
5、) 移动光标至要仿真信号的 SIM(仿真)项处,按 F5【UNSIM】(解除)取消仿真。
发那科系统u盘怎么传程序?
1、将优盘插入计算机的USB接口,并确保优盘已经被计算机识别和打开。打开法拉克机床程序所在的文件夹或工作目录,并选中需要复制的程序文件或文件夹。
2、fanuc用usb传程序文件格式,将20号参数或通道号改成1就可以用usb。改成4就可以用cf卡。改成1或0可以用rs232传输线---u盘需格式为fat格式。
3、发那科把储存卡的程序转到系统步骤如下。把优盘里面的程序文件复制到发那科Oi-TC系统的指定目录下。打开Oi-TC系统,在“程序管理”中,选择“安装程序”。把复制到发那科Oi-TC系统的程序文件安装进Oi-TC系统里面。
4、第一步,在屏幕的控制台上找到目录功能键,然后单击该操作,见下图,转到下面的步骤。第二步,执行完上面的操作之后,将进入下一级的功能键,在设备上单击,见下图,转到下面的步骤。
到此,以上就是小编对于fanuc 机器人数据采集的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏