本篇目录:
- 1、下图是智能小车红外收发电路,通过红外控制电机的运行,但是在硬件测试时...
- 2、智能循迹小车的传感器是用的什么原理
- 3、智能小车测温原理
- 4、51单片机红外循迹小车程序编程用什么软件
- 5、我想问下智能小车的寻线和红外避障是什么原理
- 6、智能车搭载红外寻迹模块的框架叫什么
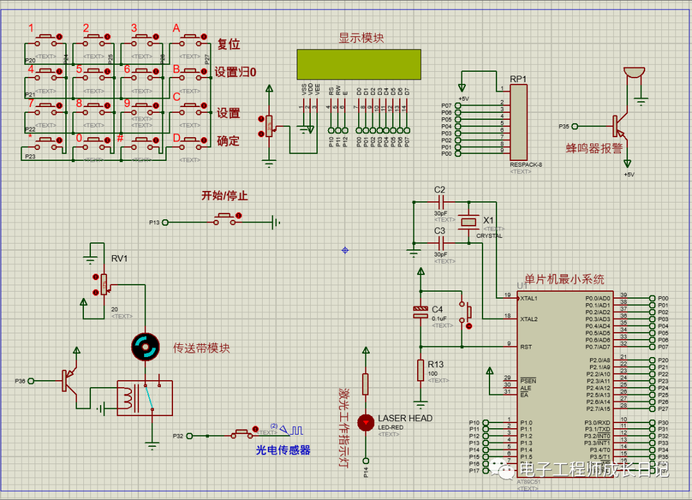
下图是智能小车红外收发电路,通过红外控制电机的运行,但是在硬件测试时...
1、寻迹探头压低一点,太高容易受干扰。一般在1cm以下,最好是半厘米。如果你用红外来遥控的话,最好对红外线进行38KHz的调制,提高抗干扰能力。
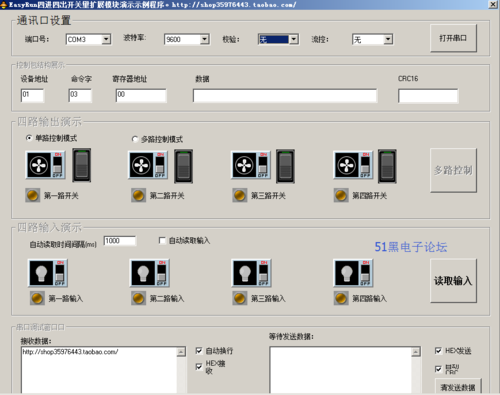
2、输入输出映像寄存器相当于是PLC内部存储器中的一部分。输入映像寄存器是PLC接收外部输入的开关量信号的窗口。PLC在每个工作周期内会把固定数量的输入点的数据刷新到输入映像区,CPU访问映像区的速度与访问内存速度相同。
-图1")
3、第二点我们再从学习PLC的难易程度来看,我们知道PLC最初是在继电器控制电路的基础上诞生的,它可以使用非常形象的梯形图作为控制“语言”,这样非常直观。
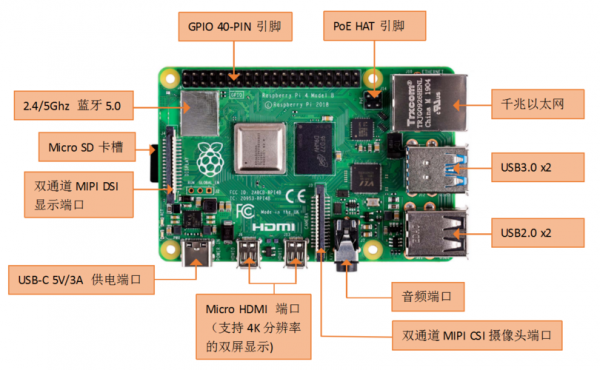
4、硬件结构 网卡的组成和主板相似,都是在一块电路板上镶嵌各种芯片、元件,使其能处理和传输接收到的信号。网卡的功能当然不及主板,但它作为连接多台电脑之间的桥梁,作用之大不可忽视。
智能循迹小车的传感器是用的什么原理
1、黑标传感器循迹小车工作原理:传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,光敏三极管一直处于关断状态,此时模块的输出端为低电平,指示二极管一直处于熄灭状态。
-图2")
2、通常循迹小车前方具有两只光电管,而循迹的原理是利用所谓印迹和道路的光线反差来实现控制。比方印迹为黑色,两只光电管全部照射在黑色印迹上面证明车辆循迹正常两个车轮同等转速。
3、智能传感器的工作原理智能传感器通常使用物理传感器来检测环境中的某些参数,如温度、光线、湿度、声音等。这些传感器将检测到的信息转换为电信号,然后通过微处理器进行处理和分析。
4、寻迹小车一般都有光电引导头,他用的是物理学原理,黑色在物理的意思上是吸收一切光线(白色的意思是反射任何光线)。
-图3")
智能小车测温原理
1、小车从无障碍地区启动前进,感应前进路线上的障碍物后,根据障碍物的位置选择下一步行进方向。并可通过两个独立按键对小车进行控速。
2、热电阻测温是基于金属导体的电阻值随温度的增加而增加这一特征来进行温度测量的。
3、热电阻的工作原理 导体的电阻值随温度变化而改变,通过测量其阻值推算出被测物体的`温度,利用此原理构成的传感器就是电阻温度传感器,这种传感器主要用于-200—500℃温度范围内的温度测量。
4、温度传感器是指能感受温度并转换成可用输出信号的传感器。温度传感器是温度测量仪表的核心部分,品种繁多。按测量方式可分为接触式和非接触式两大类,按照传感器材料及电子元件特性分为热电阻和热电偶两类。
5、测温装置的工作原理因类型不同而异。常见的有电阻温度传感器(RTD)、热电偶(Thermocouple)、温度敏感电阻(Thermistors)和半导体温度传感器(ICtemperaturesensor)。
51单片机红外循迹小车程序编程用什么软件
1、单片机使用最广泛的编程软件是keilc51,KeilC51是美国KeilSoftware公司(ARM公司之一)出品的51系列兼容单片机C语言软件开发系统。单片机C51语言是由C语言继承而来的。
2、单片机的编译软件现在最流行的是keil c51,你可以用这个软件进行编程和编译。现在市面上有很多种类型的单片机比如 :keilC51(编程),protuse(仿真),prote(画板),progisp(下载)。
3、AltiumDesigner如果是软件开发,通常只它来看原理图,类似的专业软件有挺多。Sscom这是一个串口调试工具,也是单片机编程必备的软件之一。
4、机器汇编是通过汇编软件将源程序变为机器码,用于MCS-51单片机的汇编软件有早期的A51,Keil软件是目前最流行开发MCS-51系列单片机的软件,这从近年来各仿真机厂商纷纷宣布全面支持Keil即可看出。
5、目前应用最广泛的单片机编程软件是keil和IAR。 keil主要用来开发51单片机,ARM公司收购keil这个软件后,将之进行了升级,现在叫做MDK,可以开发几乎全系列的ARM芯片。
6、目前应用最广泛的单片机编程软件是keil和IAR。keil这个是单片机编程的核心工具,用来编写和编译程序,还有一个最重要的功能就是仿真,快速地帮你定位程序BUG,不过要配合ST-Link或者其他仿真器用。
我想问下智能小车的寻线和红外避障是什么原理
1、主要利用红外传感器发出的红外线的反射原理,当红外线照射到白色地面时会有较大的反射,如果距离在传感器正常工作范围内,红外传感器能正常接收到反射回的红外线,此时会输出高电平。
2、使小车能够自主地行驶、避障、停车等。其中,传感器可以包括红外线传感器、超声波传感器、视觉传感器等,用于检测小车周围的障碍物、路面情况、光照强度等信息。
3、通过测量反射回来的红外线的强度,传感器可以确定障碍物的距离。激光传感器使用激光来探测障碍物。激光传感器会发射一束激光并记录它返回的时间。通过测量返回的激光的时间,传感器可以确定障碍物的距离。
4、它的原理是接收管接收的光强随反射物体距离的变化而变化,距离近则反射光强,距离远则反射光弱。目前,使用较多的一种红外传感器—红外光电开关的发射频率一般为38kHz左右,探测距离比较短,通常被用作近距离障碍目标的识别。
智能车搭载红外寻迹模块的框架叫什么
图1 智能小车寻迹系统框图 传感检测单元 小车循迹原理 该智能小车在画有黑线的白纸 “路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
)智能决策层 智能决策层的主要功能是接收环境感知层的信息并进行融会,对道路、车辆、行人、交通标志和交通信号等进行识别,决策分析和判断车辆驾驶模式和将要执行的操作,并向控制和执行层输送指令。
小车基本的物件(轮子,电池,电机,线,万向轮什么的),驱动板,51开发板,红外传感器。
关键词 智能车 HCSl2单片机 红外光电传感器 智能车系统以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科;主要由路径识别、角度控制及车速控制等功能模块组成。
keil软件。要做一个51单片机循迹智能小车,首先你要会单片机编程,会使用keil软件,有单片机编程的经验,因为这样你才能用程序去控制小车。
题图不方便调整检测的距离,这里直接上另一个图:红外线靠近检测电路 有实物对应,并由各个元件的名称,见下图:红外线靠近检测电路实物图 用在智能小车循迹的话,见下图:原理参考文章《红外线靠近检测电路》。
到此,以上就是小编对于红外智能小车的实验报告的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏