本篇目录:
- 1、为什么ADXL345的读数不正确?
- 2、adxl345如何应用
- 3、请教关于iic总线读adxl345的问题
- 4、求用51单片机控制ADXL345测量角度的程序,通过ADXL345传感器,用51单片机...
为什么ADXL345的读数不正确?
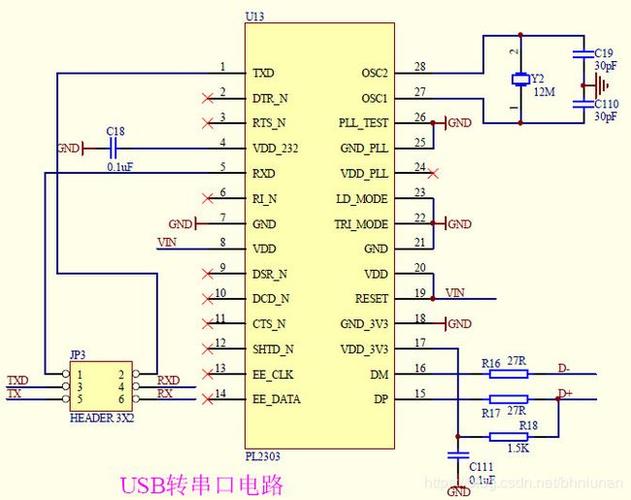
1、当时用Atmega 16L读取ADXL345的数据,也是某一轴数据明显异常,其它两轴正常。
2、ADXL345本身就有三个校准寄存器,所以你需要将X、Y、Z方向逐一测试。比如将ADXL345水平放置,那么它的Z轴方向的加速度应该是1g,如果不是,将偏差写进Z轴对应的偏移寄存器里,使它的读数为1g,其他方向也是用同样的方法。
-图1")
3、建议你检查以下几点:检查adxl345工作电压是否正常?输入信号是否常为空。adxl345的工作频率是否在要求范围内。
4、硬件问题可能多一点吧,正常时每次读取的数值也会跳动下。
5、寄存器读出来的数据直接转换成short型就对了,寄存器高位的第7bit为1就表示为负 希望我的回答对你有帮助,如果有疑问,请继续“追问”答题不易,互相理解,您的采纳是我前进的动力。
-图2")
adxl345如何应用
ADXL345是ADI公司推出的三轴数字加速度计,具有在16g下高分辨率(13Bit)测量能力,同时具备16Bit数字输出,高达4mg/LSB的灵敏度,可以用该芯片做角度传感器。下面小编就根据自己的,分享自己的理解思路。
adxl345工作电源可以选择单/双电源模式,额定电压大约3V,而51单片机用的是5V电压,需要电压转换模块,自己焊起来比较烦,我在网上花23块大洋(运费12)买了adxl345模块,已经把电压转成3V了,可以直接用。
直接测量的是加速度,积分一次能得到速度的的变化量,再积分一次能得到位移信息。如果是平衡位置周围的往复运动,例如振动,将加速度积分一次能得到速度,再积分一次能得到位移。
-图3")
检测到adxl345在某个单位时间的某几个轴上的变化量超过了某值,就可以假设这个人可能跌倒了,接下来判断(adxl345可以通过程序读出角度的变化量)角度是否有大的改变?如果有就判断跌倒,否则复位后重新检测当前状态。
ADXL345本身就有三个校准寄存器,所以你需要将X、Y、Z方向逐一测试。比如将ADXL345水平放置,那么它的Z轴方向的加速度应该是1g,如果不是,将偏差写进Z轴对应的偏移寄存器里,使它的读数为1g,其他方向也是用同样的方法。
请教关于iic总线读adxl345的问题
用51单片机控制ADXL345与IIC通信。
一般都是需要进行偏移校准的,否则可能得到的数据不准确。ADXL345本身就有三个校准寄存器,所以你需要将X、Y、Z方向逐一测试。
我可以肯定硬件没有问题,是程序的问题。我之前2周都在调IIC,好不容易调出来 temp=IIC_Wait_Ack();temp=IIC_Read_Byte(0);//读取一个字节,不继续再读,发送NAK 中间加个延时看看。
我用的是51单片机控制adxl345用IIC通信。
检测到adxl345在某个单位时间的某几个轴上的变化量超过了某值,就可以假设这个人可能跌倒了,接下来判断(adxl345可以通过程序读出角度的变化量)角度是否有大的改变?如果有就判断跌倒,否则复位后重新检测当前状态。
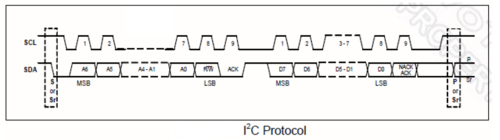
可以用51单片机进行SPI或者I2C形式接收数据。在应用程序里截取一段给你参考:sbit SCL=P0^4;//IIC时钟引脚定义 sbit SDA=P0^3;//IIC数据引脚定义 如果还不懂,可以发程序给你。
求用51单片机控制ADXL345测量角度的程序,通过ADXL345传感器,用51单片机...
这款加速度传感器的数据输出是通过16位补码形式输出的,可以用51单片机进行SPI或者I2C形式接收数据。
比如:检测到adxl345在某个单位时间的某几个轴上的变化量超过了某值,就可以假设这个人可能跌倒了,接下来判断(adxl345可以通过程序读出角度的变化量)角度是否有大的改变?如果有就判断跌倒,否则复位后重新检测当前状态。
用51单片机控制ADXL345与IIC通信。
到此,以上就是小编对于adxl345IIC的传输方向的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏